
L-REX: A New Era of Lunar Extraction With Simulation-First Terramechanics
After a period of inactivity, robotic missions are returning to the surface of the Moon. Governmental and commercial actors have good reason to ramp up lunar activity. The Moon will serve as a base for researching the solar system and as a staging testbed for sending humans to Mars.
One of the most intriguing opportunities entails the exploitation of the natural resources of the Moon. The key material is the oxygen-rich soil on the lunar surface called “regolith.” Successful extraction at scale could provide rocket fuel and dramatically lower the cost of space operations between the Earth and the Moon.
The new horizon of lunar exploration
The Moon will serve as a base for solar system science by using its low gravity and high vacuum environment to host large telescopes in the radio and optical domains. It will hopefully also serve as a staging testbed for crewed missions to Mars. This ambition follows in the footsteps of satellite missions to the Moon that have taken place since the mid-1990s, which saw the complete global mapping of the Moon and a new database of its broad compositional units. That closed critical gaps left in our understanding since the early lunar exploration phase in the 1960s and early 1970s, which also included six landings of astronauts on the Moon.
To lower the cost of space operations between the Earth and the Moon, there is a consensus in the space community that we will have to produce rocket propellants locally on the Moon. That will allow a spacecraft to refuel on the lunar surface for return trips to Earth. It could also supply propellant depots between the Moon and Earth that will benefit orbital satellites.
Commercial actors will contribute to this mission by exploiting the Moon’s natural resources, specifically regolith. The regolith contains approximately 42% oxygen by weight, chemically bound in minerals. This oxygen can be liberated through high-temperature processes to serve as an oxidant in rocket propellant combinations. It could also be used for breathing air for astronauts. That makes it critical to the future economy of space travel.
Whereas the regolith is ubiquitous on the Moon, ice is present only in shaded craters near the poles and constitutes another avenue for extracting oxygen and hydrogen. If this ice can be accessed, it promises to be an easier solution for making rocket fuel and breathable air than through the high-temperature oxygen liberation from the bulk regolith.

The challenges of excavating regolith
Orbital data from neutron measurements and radar soundings indicate that ice deposits may be in the shallow subsurface and covered by dry regolith. There may also be icy grains admixed with the regolith.
Remote sensing and mapping instruments mounted on rocket-propelled free-flying vehicles (lunar “drones”) provide one way to search out this ice. If ice can be accessed, it can be excavated through scooping or bucket wheel machines, then taken to a processing station where it would be separated from the soil grains. The ice would then split electrochemically through electrolysis into hydrogen and oxygen, with both compounds serving as the most potent rocket fuel combination.
Lunar extraction with L-REX
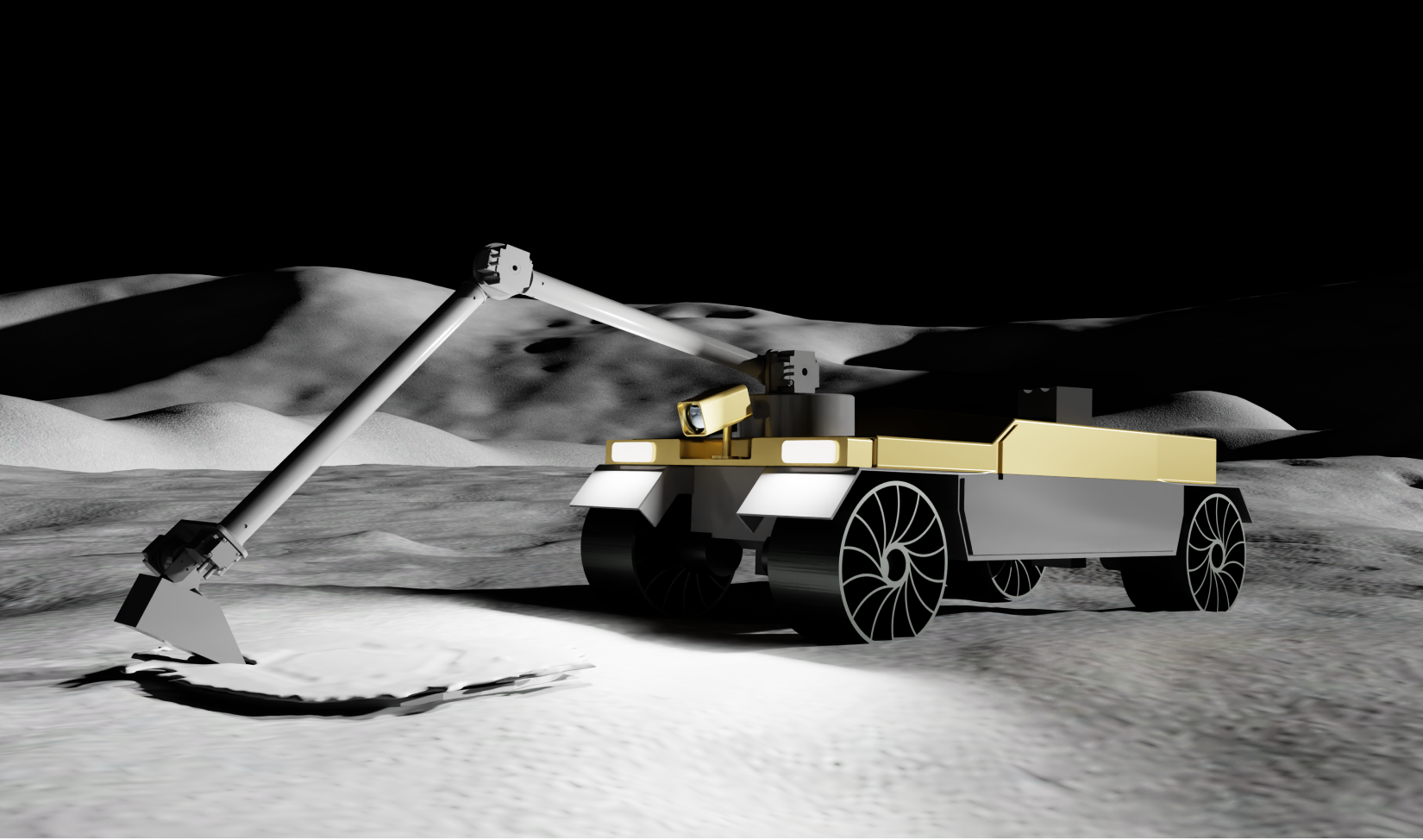
SoftServe has been testing a solution for a lunar regolith excavator called L-REX, which is suitable for interacting with icy lunar regolith. L-REX represents an exploratory system for excavation at a small scale. It consists of a four-wheeled rover carrying a multi-hinged robotic arm and a scoop capable of applying vibration agitation. Vibratory action has been shown to lower excavation forces in granular systems, including ice-cemented soils like regolith. A multi-spectral vision instrument is mounted on the arm to view the scoop's interior and the scene directly in front of L-REX.
SoftServe modeled the complete L-REX robotic system in a multi-body simulation with the representation of sensors and control in an environment. The interaction between the scoop and the regolith terrain was described via terramechanics equations to calculate the draft forces during scooping motions in real time for simulation runs. This was achieved via FMU / FMI coupling of the terramechanics physics in Modelica as part of a so-called co-simulation that used the NVIDIA Isaac Sim™ PhysX engine as the overall solver.
| Terramechanics equations | Calculations of the draft forces during scooping |
|---|---|
| ROS 2 | Functional representation of the L-REX rover and excavation elements and how they are controlled via sensory feedback |
| NVIDIA Isaac Sim™ | Representation of sensors and control, and visualization of L-REX's operations and the process of soil excavation and deposition |
| NVIDIA Isaac Sim™ PhysX | Co-simulation of FMU / FMI coupling of the terramechanics physics and overall L-REX multi-body simulation |
| NVIDIA Isaac Sim™ WARP | Visualization of the behavior of the soil particles being displaced by scooping |
Visualization of L-REX's operations and the process of soil excavation and deposition was done through rendering in NVIDIA Isaac Sim™. Specifically, the behavior of the soil particles being displaced by scooping was visualized with the WARP extension for NVIDIA Isaac Sim™. The real-time identification of icy grains within the soil mass by the simulated vision sensor is represented in the visualization by labels.

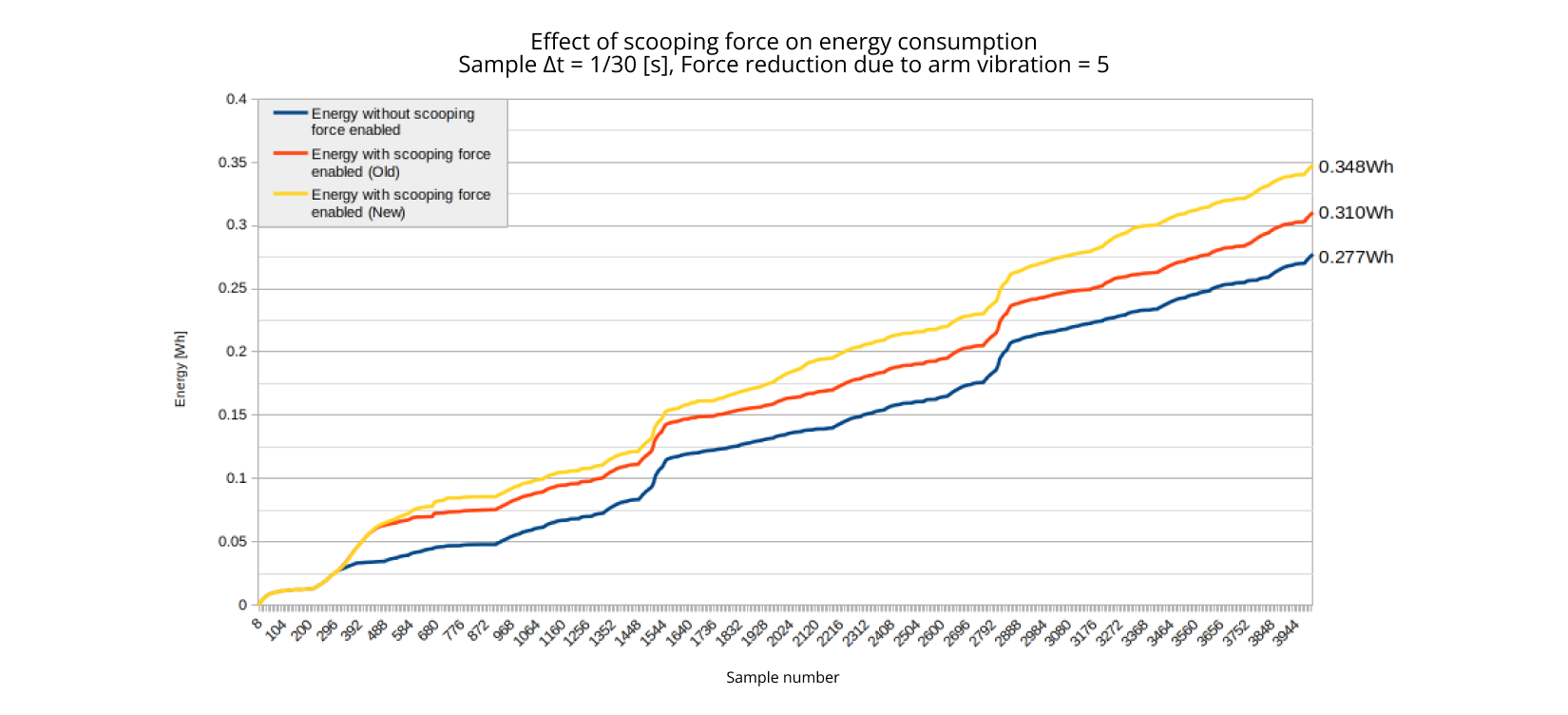
Simulation runs were conducted both with and without the mechanical scoop vibration feature. That enabled us to study the impact of vibration on excavation forces, peak power, and overall energy consumption. This allows optimizations of the operating scheme to be performed for minimized energy consumption, a critical exercise as part of the design of future larger-scale lunar excavators because electrical power is usually severely constrained in space systems.
Onwards and upwards with L-REX
As the Moon becomes a crucial base for broader solar system research and a steppingstone for human missions to Mars, the potential for utilizing its resources is vast. SoftServe’s L-REX is at the forefront of simulation-based regolith mining solutions. By leveraging NVIDIA simulation technology and terramechanics, L-REX has the potential to revolutionize the efficient extraction of icy lunar regolith.
SoftServe is applying the same approach of co-simulation with terramechanics modeling to an ongoing technology project for NASA on lunar landing and launch pad preparation. We will use our methodology to test the mobility performance of soil excavation and soil-moving vehicles.
If you would like to learn more about our simulation-first approach to developing space robotics, dig into our white paper! With detailed insights into our hardware and software stack, it also presents a test case evaluating computer vision algorithms using NASA’s POLAR Stereo dataset and photorealistic simulation developed in NVIDIA Isaac Sim.
And if you want to chat about how we can help you with your next space tech project, let’s talk.